

推荐文章

|
i黑马 · 微信们开放外链,互联网「圈地」成历史? 2 年前 |
|
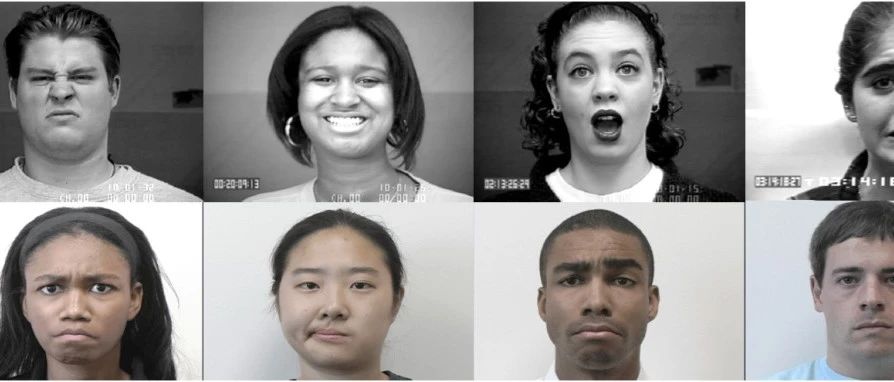
有三AI · 【人脸表情识别】基于视频的人脸表情识别数据集与基本方法 3 年前 |

|
新禽况 · 7月14日各地鸡蛋价格·全国稳定 3 年前 |

