

推荐文章


|
芯东西 · 昨晚,拜登让美国芯片法案正式生效! 1 年前 |

|
午夜超人快聘 · 正月初十 广州 各地区 热门 招聘 2 年前 |

|
粮油世界 · 磨粉机对光辊技术特性的要求 2 年前 |
|
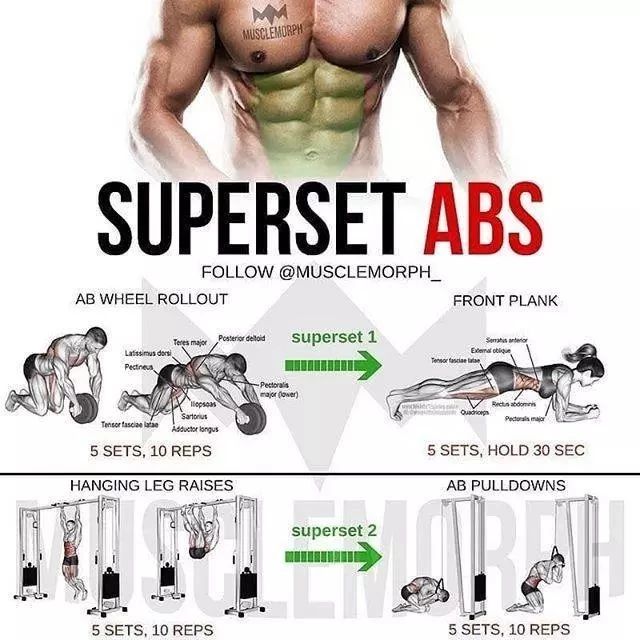
爱健身 · 6张图告诉你,全身各部位最基础的训练动作,男女通用! 4 年前 |