看啥推荐读物

专栏名称: AI开发者
| AI研习社,雷锋网旗下关注AI开发技巧及技术教程订阅号。 |
今天看啥
微信公众号rss订阅, 微信rss, 稳定的RSS源
目录
相关文章推荐

|
宝玉xp · 转发微博-20240422150943· 4 天前 |
|
|
爱可可-爱生活 · 【关于数据投毒和后门攻击的精选论文和资源列表 ...· 4 天前 |

|
爱可可-爱生活 · 【Qwen1.5 ...· 5 天前 |
|
|
爱可可-爱生活 · 【General:高性能数据探查器,能使用各 ...· 6 天前 |
|
|
宝玉xp · //@西雅图黄都督://@郑峻://@鱼姜: ...· 6 天前 |

推荐文章
|
|
宝玉xp · 转发微博-20240422150943 4 天前 |

|
老子道德经 · 人:敬天,敬地,敬自己。 1 年前 |
|
澎湃新闻 · 水稻科研还有一位泰斗 4 年前 |

|
itming · iphone11的12个常用小技巧 4 年前 |
|
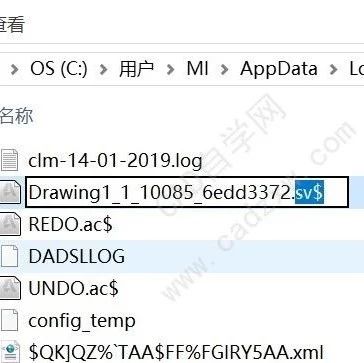
CAD自学网 · cad异常退出,如何找到自动保存的文件? 5 年前 |
|
维维说房 · 维·互动:赠送面积会不会无法兑现? 8 年前 |