之前我们讨论过DQN算法:
深度强化学习-DQN算法原理与代码
、Double DQN算法:
深度强化学习-Double DQN算法原理与代码
、Dueling DQN算法:
深度强化学习-Dueling DQN算法原理与代码
以及D3QN算法:
深度强化学习-D3QN算法原理与代码
,这些算法在求解最优策略的过程中试图估计最优价值函数,所以这些算法都被称为
最优价值算法(optimal value algorithm)
。
但是求解最优策略梯度不一定要估计最优价值函数,
策略梯度算法(policy gradient algorithm)
试图用含参函数近似最优策略,并通过迭代更新参数值。本文采用两种方法推导策略梯度算法,法一的推导过程比较简单,可以直观了解策略梯度算法的原理,但是不太严谨,具体可以参考李宏毅老师讲解PG算法的视频:
Policy Gradient
。法二的推导过程稍微复杂一点,但是推导过程严谨,Reinforce算法就是法二推导结果的直观体现。
1 策略梯度算法推导
强化学习的目标在于最大化累积期望回报,策略梯度算法给出了期望回报和策略梯度之间的关系。
采用函数近似法估计最优策略
1.1 方法一
假设智能体与环境交互一次的经验轨迹为
本次交互的累积回报为
本次经验轨迹出现的概率为
其中,
真实的累积回报为采样得到累积回报的期望
,即累积期望回报为
对
注意:式中的
由于
那么
上面求和符号可以通过采样消除,即N次采样后,得到
对
对
将
策略梯度:
至此,我们完成了策略梯度算法的推导,沿着
不过,策略梯度公式中有一个需要注意的地方,
1.2 方法二
策略
Bellman期望方程:
对以上两式关于
将
在策略
这样就得到了从
所以有
考虑到
所以
又由于
因此
策略梯度:
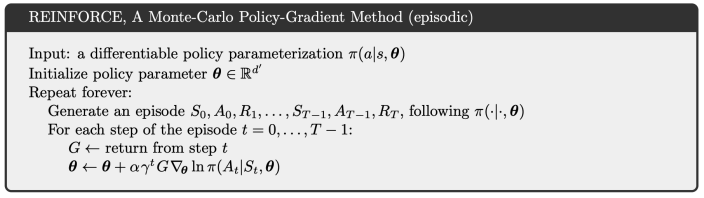
2 Reinforce算法
在每一个回合结束后,就回合中的每一步利用如下迭代式更新
这样的算法称为简单的策略梯度算法,R.Willims称它为“REward Increment=Nonnegative Factor x Offset Reinforcement x Characteristic Eligibility”(REINFORCE),表示增量
在具体的更新过程中,不一定要严格采用这样的形式。当采用自动微分的软件包来学习参数时,可以定义单步的损失为
3 Reinforce算法伪代码