看啥推荐读物

专栏名称: arXiv每日学术速递
| 跟踪计算机视觉、人工智能、机器学习、NLP、语音识别、量化金融等热门方向学术信息 |
今天看啥
微信公众号rss订阅, 微信rss, 稳定的RSS源
目录
相关文章推荐


|
中国电建 · 向“新”聚力!中国电建多个新能源项目并网发电⑨· 3 天前 |
|
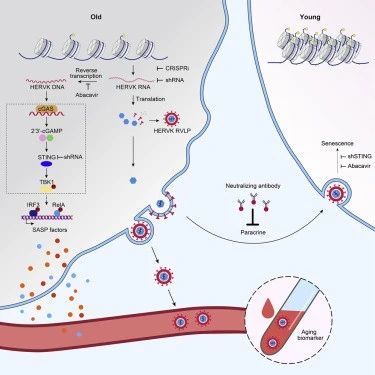
小张聊科研 · 国自然研究热点——细胞衰老(上)· 3 天前 |

|
研之成理 · 3D打印,Nature!· 5 天前 |

|
中国电建 · 丁焰章与深圳市委书记孟凡利会谈· 6 天前 |

推荐文章
|
|
中国电建 · 向“新”聚力!中国电建多个新能源项目并网发电⑨ 3 天前 |
|
|
小张聊科研 · 国自然研究热点——细胞衰老(上) 3 天前 |
|
|
研之成理 · 3D打印,Nature! 5 天前 |
|
|
中国电建 · 丁焰章与深圳市委书记孟凡利会谈 6 天前 |


|
小韭菜的成长记录 · 【海通电新】巨星科技小范围交流会20220801 1 年前 |

|
飞蚂蚁 · 知乎高赞:“你以为的健康休息,99%都是错的” 4 年前 |

|
为你读诗 · 闲时吃一粒,美味尽享,护发滋补 | 四时之味 5 年前 |